InMoov finger
Today, I decided to get on with putting together the InMoov 3d printed finger. I wanted to see how good the 3d printing was and how the construction was done for one of the fingers, seeing as I've got to do all of them, I wanted to get to see how they were put together and how they can be controlled by a servo.
Well, there's the basics all laid out:

After a bit of digging around, I found some acetone (nail varnish remover to you & me!), why we'll need that will become clear shortly....
 ....as the 3d printed finger parts are ABS, you can use the acetone with a small brush to melt the parts together - there's the finger parts on the right melted together and with the blue joint material threaded through to hold it all together - works pretty well:
....as the 3d printed finger parts are ABS, you can use the acetone with a small brush to melt the parts together - there's the finger parts on the right melted together and with the blue joint material threaded through to hold it all together - works pretty well:

For now, time to attach to the base unit:

So, this was the original HobbyKing servo I was going to use. Note those 2 extra circular discs were meant to be used, but they don't fit the servo, so I opted no to use them yet (that will change)

Now it was time to thread the tendons through the finger, I mis-used an LED to help push through the last part of the finger - hey, whatever works, right :-)

...and there we have it, 50% done...
 ..and there's the other 50% threaded through:
..and there's the other 50% threaded through:

Now to hook up the servo to digital Pin3 of the Arduino (just easier and quicker to test with the Arduino)
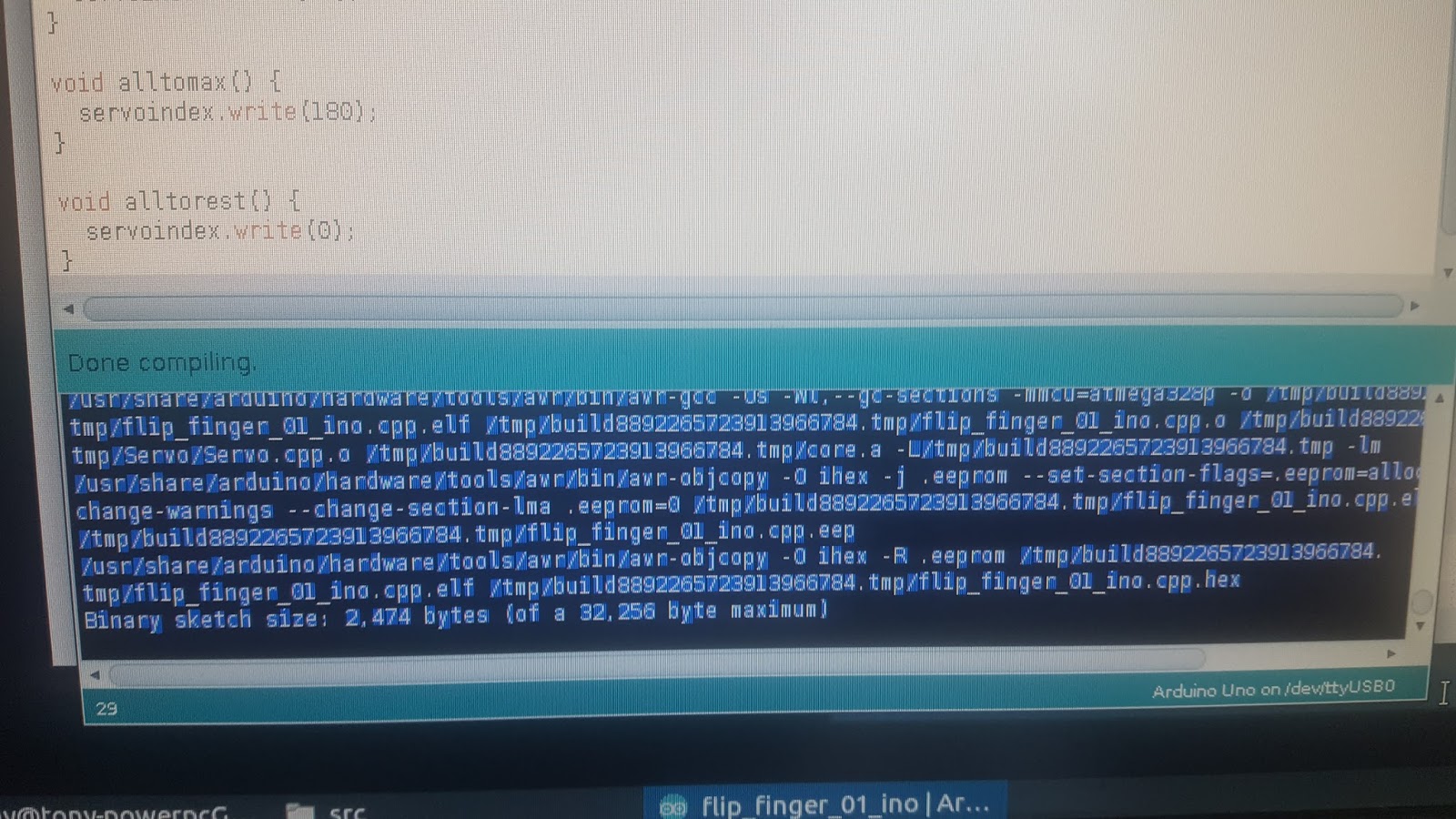
 Quick bit of code:
Quick bit of code:
 Verify and compiled:
Verify and compiled:
 Downloaded:
Downloaded:

....and there we go, we can now flip the finger when we need to. I've left off the end of the finger-tip for a good reason. You'll see the tendons are tied off there and you then melt the finger tip over the top, but it makes it permanent...and, well, I don't want to do that just yet.

Of course there are challenges. Wouldn't be fun if there wasn't some.
Here's a quick video:
As you can see, it kinda works, but I need a better pull/Robring mechanism (basically a dished outer edge to the white plastic circle on the servo, so that the tendon can move further back) - with a better mechanism the finger will be able to pull back straighter than it does right now.
Hey, it's all learning....small steps. Now, time to get those .stl files over to a 3d printer and get a whole hand and arm printed up ready for the next phase. Until then, I'll switch back to the code side of things and see if I can get the Kinect hooked up for vision and get it to react by moving servos etc...
Well, there's the basics all laid out:

After a bit of digging around, I found some acetone (nail varnish remover to you & me!), why we'll need that will become clear shortly....


For now, time to attach to the base unit:

So, this was the original HobbyKing servo I was going to use. Note those 2 extra circular discs were meant to be used, but they don't fit the servo, so I opted no to use them yet (that will change)

Now it was time to thread the tendons through the finger, I mis-used an LED to help push through the last part of the finger - hey, whatever works, right :-)

...and there we have it, 50% done...


Now to hook up the servo to digital Pin3 of the Arduino (just easier and quicker to test with the Arduino)



....and there we go, we can now flip the finger when we need to. I've left off the end of the finger-tip for a good reason. You'll see the tendons are tied off there and you then melt the finger tip over the top, but it makes it permanent...and, well, I don't want to do that just yet.

Of course there are challenges. Wouldn't be fun if there wasn't some.
Here's a quick video:
As you can see, it kinda works, but I need a better pull/Robring mechanism (basically a dished outer edge to the white plastic circle on the servo, so that the tendon can move further back) - with a better mechanism the finger will be able to pull back straighter than it does right now.
Hey, it's all learning....small steps. Now, time to get those .stl files over to a 3d printer and get a whole hand and arm printed up ready for the next phase. Until then, I'll switch back to the code side of things and see if I can get the Kinect hooked up for vision and get it to react by moving servos etc...



Comments
Post a Comment